超高性价比EtherCAT运动控制器快速入门
1、a.ZMC006CE运动控制器最多达6轴运动控制。
b.脉冲输出模式:方向/脉冲或双脉冲。
c.支持编码器位置测量,可以配置为手轮输入模式。
d.每轴最大输出脉冲频率5MHz
e.通过CAN总线,最多可扩展到512个隔离输入或输出口。
f.轴正负限位信号口/原点信号口可以随意配置为任何输入口。
g.输出口最大输出电流可达300mA,可直接驱动部分电磁阀。
h.支持最多达6轴直线插补、任意圆弧插补、螺旋插补,电子凸轮、电子齿轮、位置锁存、同步跟随、虚拟轴等功能。
i.支持ZBasic多文件多任务编程。
j.多种程序加密手段,保护客户的知识产权。
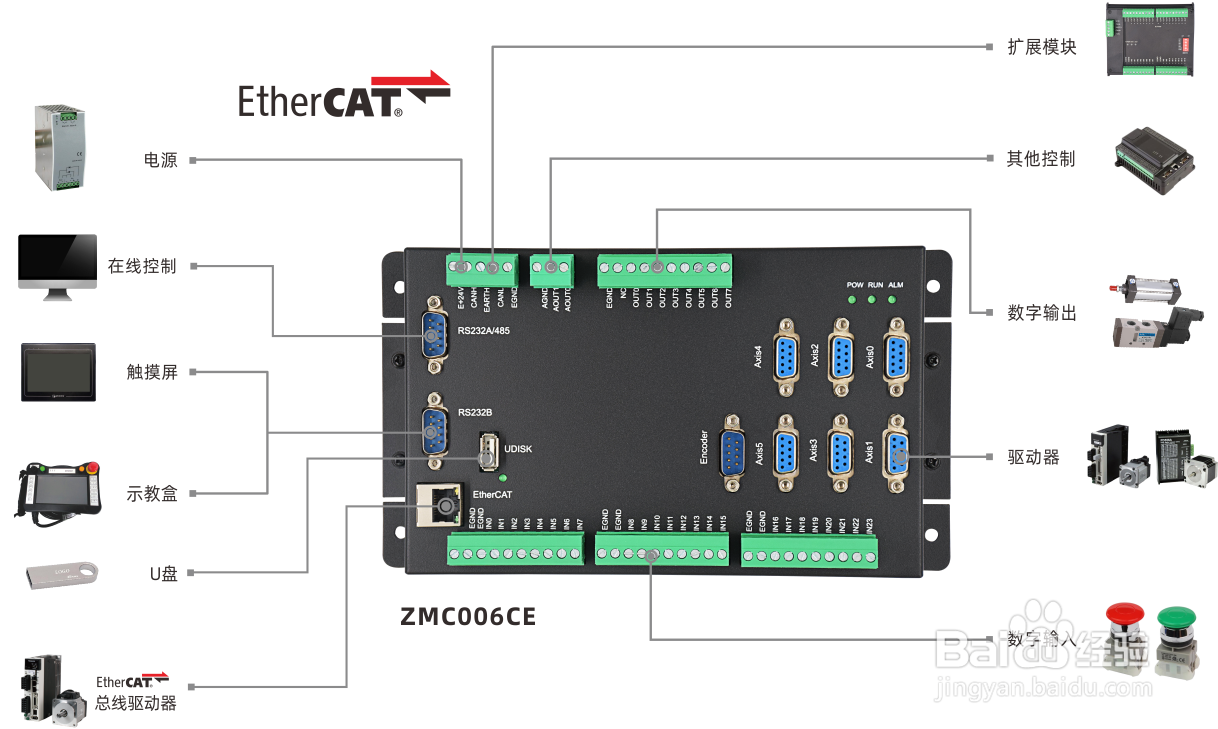
1、运动控制器上带的通讯接口:232 接口、485 接口、EtherNET网口,EtherCAT总线接口、CAN总线接口。
板上自带16个通用输入口IN,16个通用输出口OUT,2个0-10V模拟量DA,通过CAN总线可以连接各个扩展模块,在控制器自身IO点数不够用的时候,扩展输入输出点数或脉冲轴。不带编码器接口与脉冲轴接口。
注意:XPLC006E的IO需要单独采用24V直流电源供电,IO电源接通,IO Power指示灯亮,IO才能正常使用。
1、XPLC006E运动控制器的程序需要用户自行编写,控制器的开发环境可分为两类,一是使用正运动自主研发的ZDevelop编程软件开发,XPLC006E对于ZDevelop编程软件的的三种编程方式Basic/PLC/HMI均支持,也支持这三类编程方式混合使用。二是使用常用的上位机软件开发,两种方式的开发方法参见下文描述。
(1) ZDevelop编程软件。
ZDevelop编程软件可在正运动官方网站下载最新版本,下载压缩包后解压即可使用,无需安装。ZDevelop编程软件支持三种编程语言,Basic/PLC/HMI,三种语言之间可以混合编程,互相调用,详细使用方法参见“ZDevelop编程软件使用”章节。三种语言的编程手册在ZDevelop菜单栏的“帮助”快速打开文档。
使用ZDevelop编程软件的优势是程序可以下载到控制器脱机运行,节省上位机成本,同时ZDevelop提供仿真、调试、参数监控等功能,辅助客户开发,加快项目进度。

2、(2)上位机软件。
控制器支持windows,linux,Mac,Android,wince各种操作系统下的开发,提供vc,c#,vb.net,labview等各种环境的dll库。上位机软件编程参考《ZMotion PC函数库编程手册》。
使用PC上位机软件开发的程序无法下载到控制器,通过dll动态库连接到控制器。各平台开发的详细资料可通过正运动官网下载。

1、控制器使用基础流程:
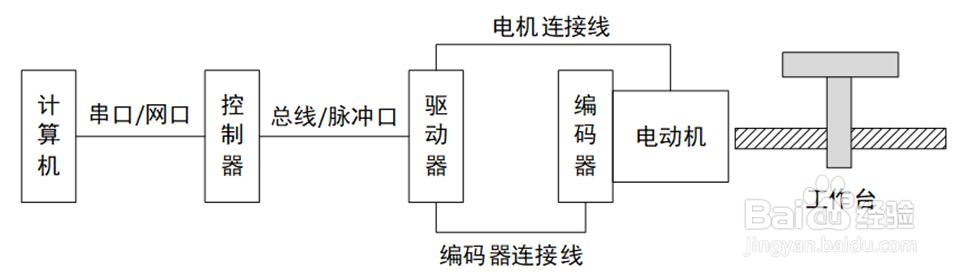
第一步:硬件接线
参考控制器系统架构图,接入主电源(控制器采用24V直流电源供电),驱动设备,IO设备,触摸屏、扩展模块等。
第二步:系统配置
设置伺服驱动器的参数,配置PC与控制器连接所需的串口或网口参数等。
第三步:连接控制器
采用串口或网口连接PC与控制器,建立通讯连接。
第四步:编程开发
选择一种开发方式,ZDevelop编程软件或上位机开发开发,参考对应的编程手册和例程,编辑程序。这里以正运动的ZDevelop编程软件为例展开描述。
第五步:程序调试
将程序下载到控制器调试程序功能,可连接ZDevelop观察调试情况。没有控制器的场合连接到仿真器调试。
第六步:运行程序
运行程序观察效果,使用ZDevelop编程软件可下载到控制器,使用其他上位机软件开发的程序通过动态库连接到控制器使用,控制器收到命令后执行运动控制。
2、工具&材料准备:
(1)硬件。
A.XPLC006E控制器一台。
B.EtherCAT伺服驱动器+电机一套
C.电脑一台。
D.带屏蔽层网线若干。
E.24V直流电源2个(一个做主电源,一个做IO电源,两路分开,防止信号干扰)。
F.接线端子与连接线若干。
(2)软件。
ZDevelop V3.10版本控制器编程软件。
从正运动官网下载压缩包,解压后直接运行应用程序,无需安装。

3、新建项目运行程序:
在电脑里新建一个文件夹用来保存即将要建立的工程。打开ZDevelop编程软件,当前说明例程的ZDevelop软件版本为V3.10,更新软件版本可以前往正运动官方网站下载。
三种编程语言ZBasic、ZPLC和ZHMI,新建项目运行的方法相同,只不过是程序编写时存在差异。三种编程语言都有对应的编程手册供参考。
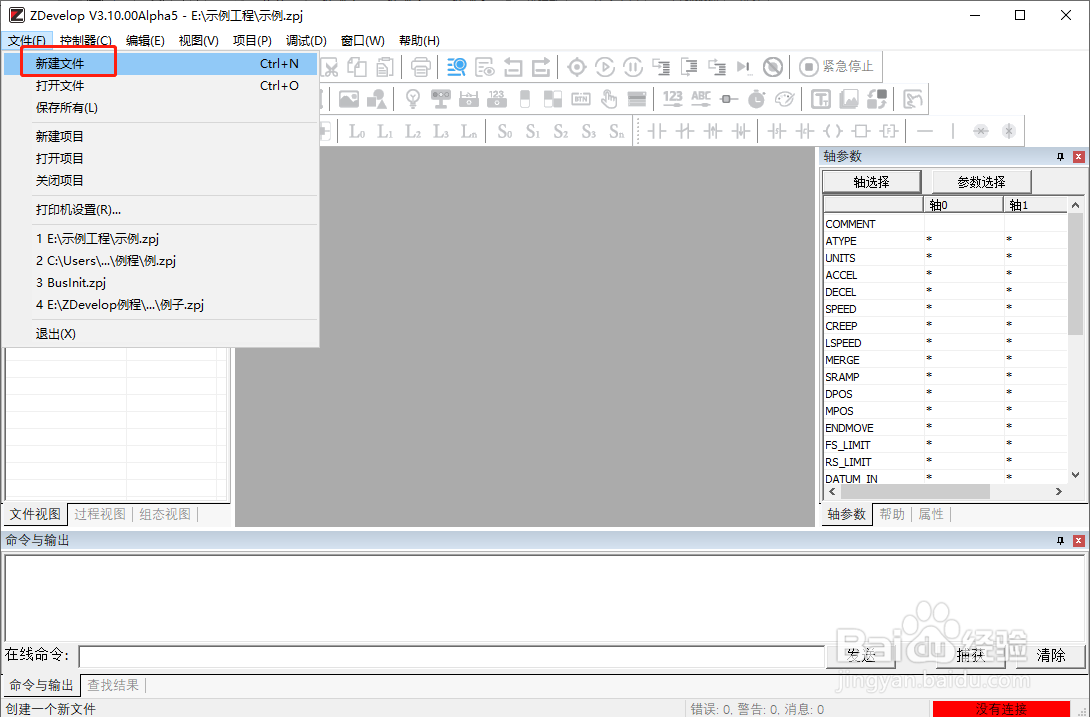
(1)新建项目:菜单栏“文件”→“新建项目”。
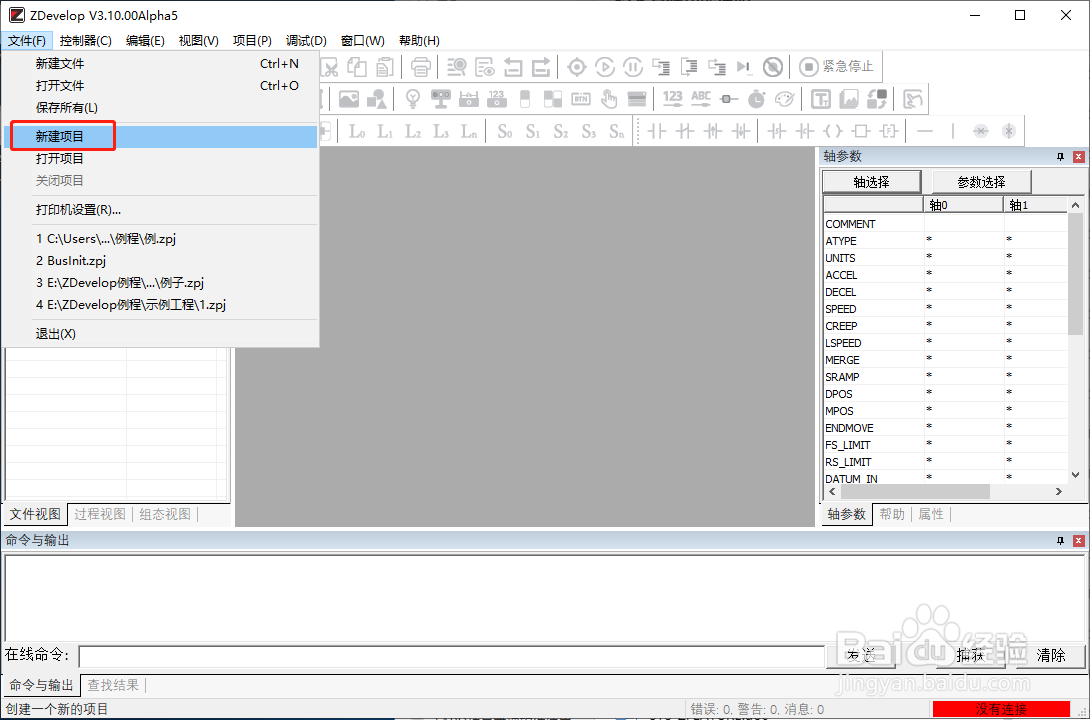
4、(2)点击“新建项目”后弹出“另存为”界面,选择一个文件夹打开,输入文件名后保存项目,后缀为“.zpj”。

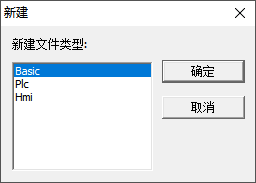
5、(3)新建文件:菜单栏“文件”→“新建文件”。
点击“新建文件”后,出现下图弹窗,支持Basic/PLC/Hmi混合编程,这里选择新建的文件类型为Basic后确认。
6、(4)设置文件自动运行:双击文件右边自动运行的位置,输入任务号“0”。

7、(5)编辑程序:程序编写完成,点击保存文件,新建的Basic文件会自动保存到项目zpj所在的文件下。
(6)连接到控制器:在程序输入窗口编辑好程序,点击“控制器”→“连接”。
没有控制器是可选择连接到仿真器仿真运行,点击“连接”→“连接到仿真器”,便可成功连接到仿真器,并弹出仿真器连接成功提示。
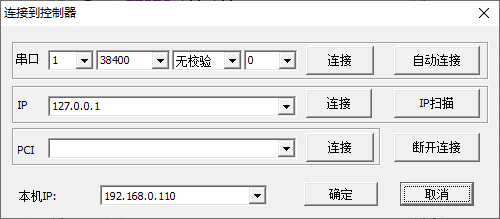
点击“连接”弹出“连接到控制器”窗口,可选择串口连接或网口连接,选择匹配的串口参数或网口IP地址后,点击连接即可。连接成功后命令与输出窗口会打印信息。
串口连接和网口连接的详细方法参见ZDevelop软件菜单栏“帮助”→“ZDevelop帮助”文档。

8、(7)下载程序:点击菜单栏按钮“下载到RAM”或按钮“下载到ROM”,下载成功命令和输出窗口会有提示,同时程序下载到控制器并自动运行。
成功下载到RAM:

9、接上:成功下载到ROM:

10、接上:RAM下载掉电后程序不保存,ROM下载掉电后程序保存。下载到ROM的程序下次连接上控制器之后程序会自动按照任务号运行。
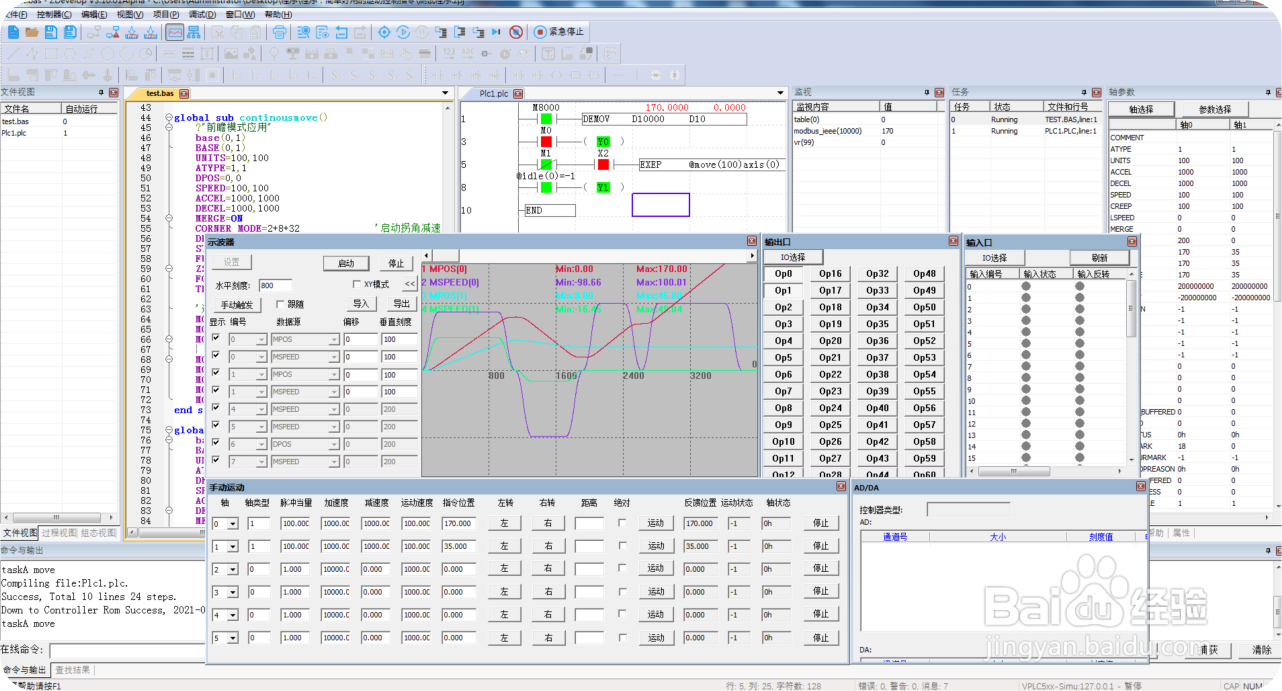
程序运行效果可通过ZDevelop软件的多种视图窗口查看,比如轴参数查看,寄存器的值查看,输入输出IO监控,示波器抓取等等。
可开启调试功能快速调试程序,程序运动过程中的错误信息、报警信息和打印信息会在ZDevelop的输出窗口打印出来,用户根据错误信息提示排查问题。